Mathématiques : 1Bac SM
Séance 9-1 : La rotation dans le plan (Cours)
Professeur : Mr CHEDDADI Haitam
Sommaire
I- Rotation - Rotation réciproque d’une rotation
1-1/ Rotation
1-2/ Rotation réciproque d'une rotation
1-3/ Décomposition d'une rotation
II- Propriétés des rotations
2-1/ Conservation de la distance
2-2/ Conservation des mesures des angles orientés
2-3/ Conservation du coefficient de colinéarité de deux vecteurs
2-4/ Conservation du barycentre
III- Images de certaines figures par une rotation
3-1/ Image d'un cercle par une rotation
3-2/ Image d'une droite, d'une demi-droite et d'un segment
IV- Composition de deux rotations
I- Rotation - Rotation réciproque d’une rotation
1-1/ Rotation
Définition
Dans le plan orienté positivement, on considère un point et un réel .
La rotation de centre et d'angle est la transformation du plan, qui à tout point du plan associe le point défini par :
- Si , alors :
- Si , alors :
On note cette transformation par , ou simplement lorsqu'il n'y a pas de confusion possible.

I- Rotation - Rotation réciproque d’une rotation
1-1/ Rotation
Remarque
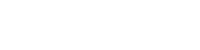
Si , alors le centre de la rotation est l'unique point invariant par cette rotation, et dans ce cas : Pour tout point du plan tel que et , on a :
- Le point appartient au cercle de centre et de rayon .
- La médiatrice du segment passe par le point .
- Le triangle est isocèle de sommet .
I- Rotation - Rotation réciproque d’une rotation
1-1/ Rotation
Applications
Soit un triangle équilatéral tel que :
- Déterminer l'angle de la rotation de centre et qui transforme en .
Soit un triangle équilatéral tel que , et le centre de gravité du triangle .
On considère la rotation de centre et d'angle .
- a- Montrer que et et .
Soit le milieu du segment .
- b- Déterminer .
Soit un carré tel que :
On note et respectivement les milieux des segments et .
- Déterminer le centre et l'angle de la rotation r dans chacun des deux cas suivants :
I- Rotation - Rotation réciproque d’une rotation
1-2/ Rotation réciproque d'une rotation
Proposition
Toute rotation du plan vers est une application bijective.
Sa bijection réciproque est la rotation , et on la note ou .
On a donc : Pour tous points et du plan :
I- Rotation - Rotation réciproque d’une rotation
1-2/ Rotation réciproque d'une rotation
Applications
Soit un carré de centre tel que : , et la rotation de centre et d'angle .
- Déterminer , puis déduire .
- Déterminer , puis déduire .
I- Rotation - Rotation réciproque d’une rotation
1-3/ Décomposition d'une rotation
Théorème
1) Si et sont deux droites parallèles, alors est la translation de vecteur où est un point de la droite et .
2) Toute translation de vecteur non nul est décomposable en deux symétries orthogonales d'axes parallèles, dont l'un est choisi arbitrairement et l'autre est son image par la translation de vecteur ou .
3) Si et sont deux droites sécantes en , alors est la rotation de centre et d'angle où et sont respectivement deux vecteurs directeurs de et .
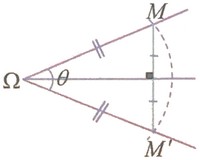
4) Toute rotation peut s'exprimer comme composée de deux symétries orthogonales et avec et sont deux droites sécantes en .
Plus précisément : , avec et où et .
I- Rotation - Rotation réciproque d’une rotation
1-3/ Décomposition d'une rotation
Applications
Soit un triangle équilatéral de centre tel que :
- a- Déterminer une mesure de chacun des angles et .
- b- Déterminer puis tracer les droites , , et telles que :
et
- a- Déterminer lorsque .
Soit et deux droites parallèles et une droite perpendiculaire à et .
- b- Déterminer , et .
Soit un cercle de centre et et deux points distincts de .
Soit un point de distinct de et .
On note et les médiatrices respectives des segments et .
- Déterminer et .
Soit un carré tel que :
Soit la rotation de centre et d'angle .
- Montrer que est la composée des deux symétries orthogonale dont on déterminera les axes.
II- Propriétés des rotations
2-1/ Conservation de la distance
Proposition
Soit et sont deux points du plan .
Si et , alors :
On dit que la rotation conserve la distance.
II- Propriétés des rotations
2-2/ Conservation des mesures des angles orientés
Proposition
Soit et sont deux points du plan .
Si et , alors :
(On rappelle que désigne l’angle de la rotation )
Remarque
La propriété précédente permet de déterminer l'angle d'une rotation à partir de deux points distincts et leurs images.
II- Propriétés des rotations
2-2/ Conservation des mesures des angles orientés
Proposition
Soit , , et quatre points du plan tels que et .
Soit , , et leurs images respectives par la rotation .
Alors :
On dit que la rotation conserve les mesures des angles orientés.

II- Propriétés des rotations
2-3/ Conservation du coefficient de colinéarité de deux vecteurs
Proposition
Soit , et trois points alignés tels que où .
Si , et , alors :
On dit que la rotation conserve l'alignement des points et le coefficient de colinéarité de deux vecteurs.
II- Propriétés des rotations
2-3/ Conservation du coefficient de colinéarité de deux vecteurs
Applications
Soit un triangle tel que la mesure principale de l'angle est positif.
On construit en dehors du triangle des carrés , et .
- En utilisant une rotation convenable, montrer que les droites et sont perpendiculaires.
- Montrer que les droites et sont perpendiculaires.
On considère la rotation de centre et d'angle .
Soit le milieu du segment .
On pose :
- a- Montrer que le point appartient à la droite passant par et parallèle à la droite .
- b- En déduire que est une hauteur du triangle .
II- Propriétés des rotations
2-4/ Conservation du barycentre
Proposition
Soit le barycentre du système pondéré tel que .
Si , et , alors est le barycentre du système .
On dit que la rotation conserve le barycentre.
Remarques
On peut étendre cette propriété au barycentre de trois ou quatre points pondérés.
La rotation conserve le milieu d'un segment et le centre de gravité d'un triangle.
II- Propriétés des rotations
2-4/ Conservation du barycentre
Applications
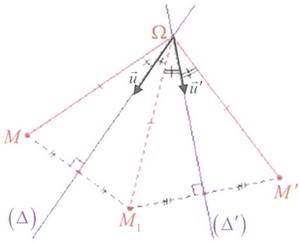
Soit et deux carrés tels que :
et et et .
Soit la rotation de centre et transformant le point en .
- a- Déterminer une mesure de l'angle de la rotation .
- b- Montrer que et .
- c- Déterminer la mesure principale de l'angle orienté .
Soit le barycentre des points pondérés , et .
On pose :
- Montrer que les points , et sont alignés.
III- Images de certaines figures par une rotation
3-1/ Image d'un cercle par une rotation
Proposition
L'image du cercle , de centre et de rayon , est le cercle où .

III- Images de certaines figures par une rotation
3-2/ Image d'une droite, d'une demi-droite et d'un segment
Proposition
Soit et deux points distincts du plan.
Si et , alors :
et et

III- Images de certaines figures par une rotation
3-2/ Image d'une droite, d'une demi-droite et d'un segment
Remarques
- La rotation conserve le parallélisme : les images de deux droites parallèles par une rotation sont deux droites parallèles.
- La rotation conserve l’orthogonalité: les images de deux droites perpendiculaires par une rotation sont deux droites perpendiculaires.
- L'image d'un triangle isocèle par une rotation est un triangle isocèle.
- L'image d'un triangle rectangle par une rotation est un triangle rectangle.
- L'image d'un triangle équilatéral par une rotation est un triangle équilatéral.
- L'image d'un rectangle par une rotation est un rectangle.
- L'image de l'intersection de deux figures par une rotation est l'intersection des images de ces deux figures par cette rotation : Si et sont deux figures géométriques, alors :
III- Images de certaines figures par une rotation
3-2/ Image d'une droite, d'une demi-droite et d'un segment
Applications
Soit un carré tel que :
Soit un point du segment , et le cercle de centre et de rayon .
Le cercle coupe la droite en et la droite en .
- Construire une figure convenable.
- Montrer que et .
IV- Composition de deux rotations
Théorème
Soit et deux rotations du plan d’angles non nuls.
- Si , alors est la rotation de centre et d’angle .
De plus, on a dans ce cas :
- Si et , alors est une rotation d’angle .
- Si et , alors est une translation.
Remarque
Dans le cas où et , alors pour déterminer le vecteur de la translation, il suffit de déterminer l’image d’un point connu par la translation .
Si par exemple , alors le vecteur de la translation est :
IV- Composition de deux rotations
Théorème
Soit un triangle équilatéral de centre de gravité tel que :
- Déterminer la nature de chacune des applications suivantes :