Mathématiques : 1Bac S.Exp – STE – STM
Séance 12 (Géométrie analytique de l’espace)
Professeur : Mr ETTOUHAMY Abdelhak
Sommaire
I- Coordonnées d’un point
1-1/ Base et repère de l’espace
1-2/ Coordonnées d’un point par rapport un repère – Coordonnées d’un vecteur par rapport une base
1-3/ Coordonnées des vecteurs , et
II- Deux vecteurs colinéaires - Trois vecteurs coplanaires
2-1/ Conditions de colinéarité de deux vecteurs
2-2/ Conditions de coplanarité de trois vecteurs
III- Représentation paramétrique d’une droite de l’espace
IV- Positions relatives de deux droites dans l’espace
V- Représentation paramétrique d’un plan – Équation cartésienne d’un plan de l’espace
5-1/ Représentation paramétrique d’un plan
5-2/ Équation cartésienne d’un plan de l’espace
5-3/ Positions relatives de deux plans
VI- Système de deux équations cartésiennes d’une droite de l’espace
6-1/ Système de deux équations cartésiennes d’une droite
6-2/ Positions relatives d’une droite et un plan de l’espace
VII- Exercices
7-1/ Exercice 1
7-2/ Exercice 2
7-3/ Exercice 3
7-4/ Exercice 4
7-5/ Exercice 5
7-6/ Exercice 6
I- Coordonnées d’un point
1-1/ Base et repère de l’espace
Vocabulaire
Le triplet s’appelle base de l’espace .
On dit que l’espace est muni (ou rapporté) de la base .
Le quadruplet s’appelle repère de l’espace.
On dit que l’espace est muni (ou rapporté au) du repère .
I- Coordonnées d’un point
1-2/ Coordonnées d’un point par rapport un repère – Coordonnées d’un vecteur par rapport une base
Définition
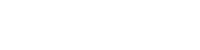
Pour tout point de l’espace muni du repère , il existe un et un seul triplet tel que :
Le triplet s’appelle les coordonnées du point par rapport au repère .
On note : ou
Le triplet s’appelle aussi les coordonnées du vecteur de l’espace par rapport au repère (ou encore par rapport à la base ).
On note : ou
Le nombre réel s’appelle l’abscisse du point de l’espace par rapport au repère .
Le nombre réel s’appelle l’ordonné du point de l’espace par rapport au repère .
Le nombre réel s’appelle la cote du point de l’espace par rapport au repère .
I- Coordonnées d’un point
1-3/ Coordonnées des vecteurs , et
Propriété
Soient et deux vecteurs et et deux points de l’espace rapporté au repère , et le milieu du segment et .
On a :
1) et
2)
3)
II- Deux vecteurs colinéaires - Trois vecteurs coplanaires
2-1/ Conditions de colinéarité de deux vecteurs
Propriété (Rappel)
Soient et deux vecteurs de l’espace rapporté au repère .
et sont colinéaires équivaut à il existe de tel que ou .
II- Deux vecteurs colinéaires - Trois vecteurs coplanaires
2-1/ Conditions de colinéarité de deux vecteurs
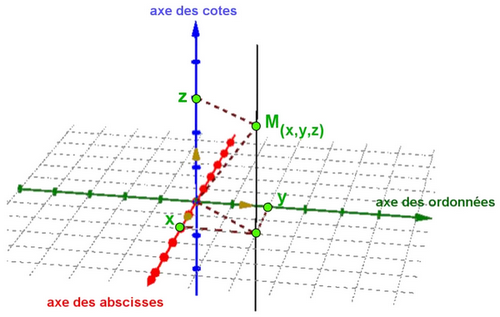
Déterminants extraites de et
Soient et deux vecteurs de l’espace rapporté au repère .
Les déterminants suivants :
s’appellent les déterminants extraites de et .
et sont colinéaires équivaut à (les déterminants extraites de et sont tous nuls).
II- Deux vecteurs colinéaires - Trois vecteurs coplanaires
2-2/ Condition de coplanarité de trois vecteurs
Déterminant de trois vecteurs de l’espace
Soient et et trois vecteurs de l’espace rapporté au repère .
Le nombre :
est appelé déterminant des vecteurs et et dans cet ordre.
II- Deux vecteurs colinéaires - Trois vecteurs coplanaires
2-2/ Condition de coplanarité de trois vecteurs
Propriété
Soient et et trois vecteurs de l’espace rapporté au repère .
et et sont coplanaires si et seulement si .
III- Représentation paramétrique d’une droite de l’espace
Définition
Le système s’appelle représentation paramétrique de la droite
Remarques
Pour chaque valeur du paramètre on obtient un point et un seul, et la réciproque est vraie.
Par exemple : la valeur donne le point .
La représentation paramétrique de la droite n’est pas unique, on peut remplacer par coordonnées du point à condition que .
IV- Positions relatives de deux droites dans l’espace
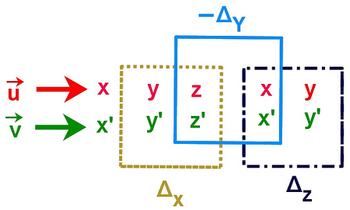
Activité
On considère dans l’espace rapporté au repère les droites et et et .
- Déduire les différentes positions relatives distinctes entre deux droites :
IV- Positions relatives de deux droites dans l’espace
Propriété
et sont deux droites de l’espace rapporté au repère .
1) ( et sont colinéaire et les deux droites ont un point commun).
2) et sont strictement parallèles ( et sont colinéaire et les deux droites n’ont pas un point commun).
3) ( et ne sont pas colinéaires et le point I est commun aux deux droites).
4) et sont deux droites non coplanaires ( et ne sont pas colinéaires et les deux droites n’ont pas des points communs) ( et et ne sont pas coplanaires).
V- Représentation paramétrique d’un plan – Équation cartésienne d’un plan de l’espace
5-1/ Représentation paramétrique d’un plan
Définition
Le système s’appelle représentation paramétrique du plan de l’espace .
Remarques
Pour chaque valeur du paramètre et du paramètre on obtient un point et un seul, et la réciproque est vraie.
La représentation paramétrique du plan n’est pas unique, on peut remplacer par coordonnées du point à condition que .
V- Représentation paramétrique d’un plan – Équation cartésienne d’un plan de l’espace
5-2/ Équation cartésienne d’un plan de l’espace
Définition et propriété
Soit un plan de l’espace rapporté au repère .
Le plan est l’ensemble des points de l’espace qui vérifie l’équation :
avec et et sont les déterminants extraites de et .
L’équation s’appelle équation cartésienne du plan .
En générale l’équation s’écrit , avec et et et sont des réels et (au moins un nombre est non nul).
V- Représentation paramétrique d’un plan – Équation cartésienne d’un plan de l’espace
5-2/ Équation cartésienne d’un plan de l’espace
Application
On donne l'équation cartésienne du plan .
Méthode 1 :
Méthode 2 :
V- Représentation paramétrique d’un plan – Équation cartésienne d’un plan de l’espace
5-3/ Positions relatives de deux plans
Activité
On considère dans l’espace rapporté au repère les droites et et et
Déduire les différentes positions relatives distinctes entre deux plans :
V- Représentation paramétrique d’un plan – Équation cartésienne d’un plan de l’espace
5-3/ Positions relatives de deux plans
Propriété
et sont deux plans del’espace rapporté au repère .
1) Les 2 plans sont confondues :
2) Les 2 plans sont strictement parallèles :
3) Les 2 plans sont sécants suivant une droite :
et ne sont pas colinéaires
au moins deux des rapports suivants et et ne soient pas égaux.
4) et sont deux plans sécants( et et sont coplanaires, et aussi les vecteurs et et ).
VI- Système de deux équations cartésiennes d’une droite de l’espace
6-1/ Système de deux équations cartésiennes d’une droite
Propriété et définition
Dans l’espace rapporté au repère , on considère la droite .
Un point de l’espace appartient à la droite si et seulement si on a :
- 1er cas : on suppose que les nombres et et sont non nuls :
s’appelle système de deux équations cartésiennes de la droite .
- 2ème cas : on suppose qu’un nombre seul parmi les nombres et et est nul ( on suppose que )
s’appelle système de deux équations cartésiennes de la droite .
- 3ème cas : on suppose que juste deux nombres parmi les nombres et et sont nuls ( on suppose que et )
s’appelle système de deux équations cartésiennes de la droite .
VI- Système de deux équations cartésiennes d’une droite de l’espace
6-2/ Positions relatives d’une droite et un plan de l’espace
Activité
On considère dans l’espace rapporté au repère une droite et un plan .
- Déduire les différentes positions relatives distinctes entre le plan et la droite :
VI- Système de deux équations cartésiennes d’une droite de l’espace
6-2/ Positions relatives d’une droite et un plan de l’espace
Propriété
Soient une droite et un plan de l’espace rapporté au repère .
1) La droite est inclue dans le plan (les vecteurs et et sont coplanaires et )
2) Le droite est strictement parallèle u plan (les vecteurs et et sont coplanaires et ).
3) La droite coupe le plan au point (les vecteurs et et ne sont pas coplanaires).
VII- Exercices
7-1/ Exercice 1
On considère les vecteurs , et .
- Montrer que les vecteurs , et sont coplanaires.
On considère les vecteurs , et .
- Déterminer m pour que les vecteurs , et soient coplanaires.
VII- Exercices
7-2/ Exercice 2
On considère les points , , et .
Soit un point de l’espace.
- Montrer que si , alors tel que le système est une représentation paramétrique de la droite .
- Montrer que .
- Le point appartient-il à la droite ?
VII- Exercices
7-3/ Exercice 3
- Déterminer deux équations cartésiennes de la droite passant par le point et dirigée par le vecteur .
Soit une droite définie par ses deux équations cartésiennes suivantes :
- Déterminer un vecteur directeur de la droite et un point de .
- Déduire une représentation paramétrique de la droite .
VII- Exercices
7-4/ Exercice 4
On considère les points , et .
- Montrer que les points , et ne sont pas alignés.
Soit un point de l’espace.
- Montrer que le système est une représentation paramétrique du plan .
- En déduire que .
VII- Exercices
7-5/ Exercice 5
- Étudier les positions relatives de la droite et la droite dans les cas suivants :
VII- Exercices
7-6/ Exercice 6
- Étudier la position relative de la droite et le plan dans les cas suivants :